A cikk tartalma Show
A modern ipar és a mindennapi élet számtalan területén találkozhatunk olyan elektromos gépekkel, amelyek mozgást generálnak, energiát alakítanak át, és nélkülözhetetlenek a termelés, a szállítás, sőt, még a háztartások működése szempontjából is. Ezen gépek közül kiemelkedik az aszinkron motor, más néven indukciós motor, amely egyszerűsége, robusztussága és megbízhatósága révén vált a legelterjedtebb típusú váltakozó áramú motorrá. Ez a cikk részletesen bemutatja az aszinkron motor működési elvét, felépítését, típusait, vezérlési lehetőségeit és széles körű alkalmazási területeit, gyakorlati példákkal illusztrálva a komplex műszaki fogalmakat.
Az aszinkron motorok globális dominanciája nem véletlen. Költséghatékonyak, kevés karbantartást igényelnek, és hosszú élettartamúak, ami gazdaságilag rendkívül vonzóvá teszi őket. Megértésük kulcsfontosságú mindenki számára, aki az iparban, az automatizálásban vagy akár csak a háztartási gépek működésének mélyebb megismerésében érdekelt.
Az aszinkron motor alapjai: Történelem és jelentőség
Az aszinkron motor története szorosan összefonódik a váltakozó áramú rendszerek fejlődésével, és olyan nagy nevekhez köthető, mint Nikola Tesla és Galileo Ferraris. Bár Ferraris publikált előbb a forgó mágneses mező elvéről és egy aszinkron motor prototípusáról 1888-ban, Tesla már 1887-ben szabadalmaztatta a saját verzióját, ami a modern háromfázisú aszinkron motor alapjául szolgált. Ezek a felfedezések forradalmasították az elektromos energiatermelést és -elosztást, lehetővé téve a váltakozó áramú rendszerek széles körű elterjedését.
A 19. század végén a váltakozó áramú rendszerek térnyerése, szemben az egyenáramúakkal, nagyrészt annak volt köszönhető, hogy a váltakozó áram nagy távolságokra is hatékonyabban továbbítható, és feszültsége transzformátorokkal könnyedén alakítható. Az aszinkron motorok jelentősége ebben a kontextusban vált nyilvánvalóvá, hiszen megbízható és hatékony meghajtást biztosítottak az ipari folyamatokhoz.
Ma az aszinkron motorok a világ elektromos energiafogyasztásának jelentős részéért felelősek. Szinte minden iparágban megtalálhatók, a kisebb ventilátoroktól és szivattyúktól kezdve a hatalmas kompresszorokig és szállítószalagokig. Ez a széles körű alkalmazás teszi őket a villamos gépek gerincévé, és indokolja alapos megismerésüket.
Működési elv: A forgó mágneses mező
Az aszinkron motor működésének megértéséhez kulcsfontosságú a forgó mágneses mező fogalmának tisztázása. Ellentétben az egyenáramú motorokkal, ahol a kommutátor mechanikusan hozza létre a mágneses pólusok váltakozását, az aszinkron motorokban ezt a jelenséget az áramellátás természete biztosítja.
Amikor egy háromfázisú váltakozó áramot vezetünk a motor állórészének (statorának) tekercseibe, amelyek térben eltolva helyezkednek el (általában 120 fokkal), egy különleges jelenség jön létre. Az egyes fázisok árama időben is eltolva (szintén 120 fokkal) változik, ami azt eredményezi, hogy a tekercsek által keltett mágneses mezők eredője folyamatosan és egyenletesen forog a motor belsejében. Ezt hívjuk szinkron fordulatszámnak (ns), és ez a fordulatszám a tápláló hálózat frekvenciájától és a motor póluspárok számától függ.
A szinkron fordulatszám a következő képlettel adható meg:
ns = (120 * f) / P
Ahol:
nsa szinkron fordulatszám [fordulat/perc]fa hálózati frekvencia [Hz] (Magyarországon 50 Hz)Pa pólusok száma (nem a póluspárok száma!)
Például egy 50 Hz-es hálózaton egy 4 pólusú motor szinkron fordulatszáma: (120 * 50) / 4 = 1500 ford/perc. Ez a forgó mágneses mező a motor működésének alapja.
A stator és a rotor felépítése
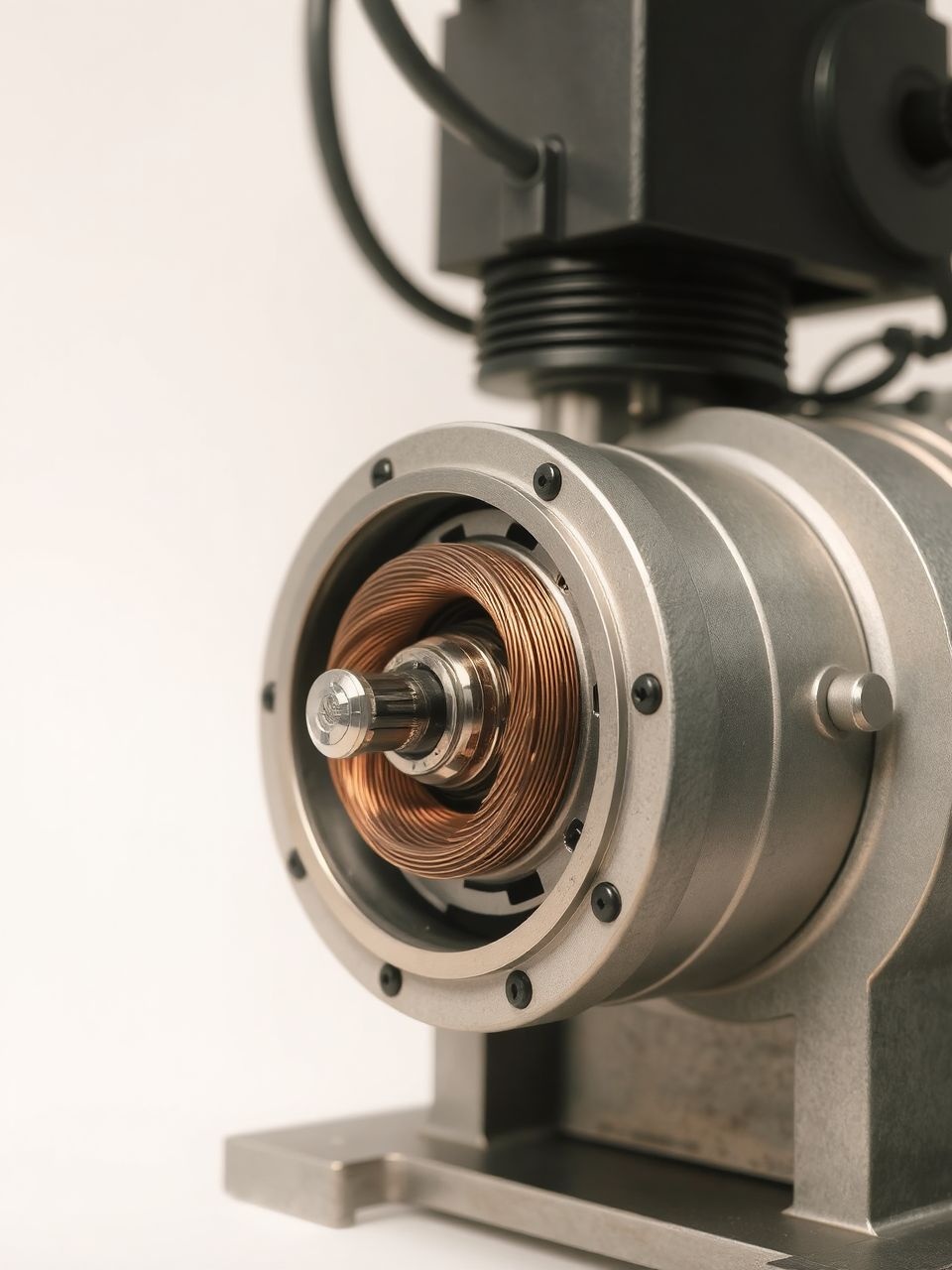
Az aszinkron motor két fő részből áll: az állórészből (stator) és a forgórészből (rotor). Mindkét rész gondos tervezés eredménye, hogy a lehető legoptimálisabb módon tudják az elektromos energiát mechanikai mozgássá alakítani.
A stator: Az aszinkron motor szíve
A stator az aszinkron motor mozdulatlan része, amely a motor házában található. Fő feladata a forgó mágneses mező létrehozása. Felépítése a következő elemekből áll:
- Stator lemezelés (mag): Vékony, szigetelt, egymásra rétegelt transzformátorlemezekből áll, amelyek csökkentik az örvényáramú és hiszterézis veszteségeket. Ezek a lemezek hornyokat tartalmaznak, amelyekbe a tekercsek kerülnek.
- Stator tekercsek: Ezek rézvezetékekből álló tekercsek, amelyek a lemezelés hornyaiban helyezkednek el. Háromfázisú motoroknál három független tekercsrendszer található, térben 120 fokkal eltolva. Amikor a háromfázisú áram áthalad rajtuk, létrehozzák a forgó mágneses mezőt.
- Motorház: Öntöttvasból vagy alumíniumból készült külső burkolat, amely védi a belső alkatrészeket, és gyakran bordázott felülettel rendelkezik a jobb hőelvezetés érdekében.
A stator tekercselése általában csillag (Y) vagy delta (Δ) kapcsolásban van, attól függően, hogy milyen feszültségről üzemeltetik, és milyen indítási módot alkalmaznak. A motor adattábláján ezek az információk mindig fel vannak tüntetve.
A rotor: A mozgás forrása
A rotor az aszinkron motor forgó része, amely a stator belsejében helyezkedik el, és csapágyak segítségével szabadon foroghat. Két fő típusa létezik:
Kalickás (ketreces) rotor
Ez a leggyakoribb rotortípus, nevét a mókuskerékre emlékeztető felépítéséről kapta. Főbb jellemzői:
- Rotor lemezelés: Hasonlóan a statorhoz, ez is vékony, szigetelt lemezekből áll, amelyek hornyokat tartalmaznak.
- Rúdjai: Alumíniumból vagy rézből készült vezetők, amelyek a lemezelés hornyaiban helyezkednek el. Ezek a rudak mindkét végükön rövidzárgyűrűkkel vannak összekötve, így egyfajta „ketrecet” vagy „kalickát” alkotnak.
- Egyszerűség és robusztusság: Nincsenek kefék vagy csúszógyűrűk, ami rendkívül egyszerűvé, megbízhatóvá és karbantartásmentessé teszi.
A kalickás motorok az iparban és a háztartásokban egyaránt elterjedtek, például ventilátorokban, szivattyúkban, kompresszorokban.
Tekercselt (csúszógyűrűs) rotor
Ez a típus bonyolultabb felépítésű, de nagyobb rugalmasságot biztosít a motor indításakor és fordulatszám-szabályozásakor. Elemei:
- Rotor tekercsek: A kalickás rotor rudai helyett itt tényleges tekercsek találhatók, amelyek csillag vagy delta kapcsolásban vannak.
- Csúszógyűrűk: A rotor tengelyére szerelt rézgyűrűk, amelyek elektromosan csatlakoznak a rotor tekercseinek végeihez.
- Kefék: Grafitból készült kefék, amelyek a csúszógyűrűkön fekszenek, és külső ellenállásokat vagy rövidzárat kötnek a rotor tekercseire.
A csúszógyűrűs motorokat olyan alkalmazásokban használják, ahol nagy indítónyomatékra vagy precíz fordulatszám-szabályozásra van szükség, például darukban vagy felvonókban.
Az indukció jelensége és a forgatónyomaték keletkezése

Az aszinkron motor működésének lényege az elektromágneses indukció jelenségében rejlik, amelyet Faraday törvénye ír le. Ahogy a statorban létrejövő forgó mágneses mező áthalad a rotor vezetékein, feszültséget indukál bennük. Mivel a rotor tekercsei vagy rúdjai rövidre vannak zárva (akár a kalickás rotor rövidzárgyűrűi által, akár a csúszógyűrűs rotor külső rövidzárkapcsolója által), ez az indukált feszültség áramot hoz létre a rotorban.
A Lenz-törvény szerint az indukált áram olyan irányba folyik, hogy az általa keltett mágneses mező akadályozza az őt létrehozó okot. Ebben az esetben az ok a stator forgó mágneses mezeje által okozott fluxusváltozás. Ezért a rotorban folyó áram saját mágneses mezőt hoz létre, amely kölcsönhatásba lép a stator forgó mágneses mezőjével. Ez a kölcsönhatás egy forgatónyomatékot (nyomatékot) eredményez a rotoron, amely elindítja és forgatja azt a stator mágneses mezejének irányába.
A rotor addig gyorsul, amíg az általa kifejtett mechanikai nyomaték egyensúlyba nem kerül a terhelés nyomatékával és a súrlódási veszteségekkel. Fontos megérteni, hogy a rotor soha nem éri el a stator mágneses mezejének szinkron fordulatszámát. Ha elérné, akkor nem lenne relatív mozgás a rotor vezetői és a forgó mágneses mező között, így nem indukálódna feszültség és áram a rotorban, ezáltal megszűnne a forgatónyomaték. Ez az oka, hogy az aszinkron motor „aszinkron” (nem szinkron) módon működik.
„Az aszinkron motor zsenialitása abban rejlik, hogy a mozgáshoz szükséges áramot maga generálja a stator forgó mágneses mezejének indukciós hatására, egy elegánsan egyszerű, önfenntartó mechanizmusban.”
A csúszás (szlip) fogalma és jelentősége
Az aszinkron motorok működésének egyik legfontosabb jellemzője a csúszás vagy szlip (s). Ez a jelenség írja le a különbséget a stator forgó mágneses mezejének szinkron fordulatszáma (ns) és a rotor tényleges fordulatszáma (n) között. Ahogy korábban említettük, a rotor soha nem éri el a szinkron fordulatszámot.
A csúszás mértékét a következő képlettel fejezhetjük ki:
s = (ns - n) / ns
A csúszást általában százalékban adják meg. Üresjárati állapotban, amikor a motor terhelés nélkül forog, a csúszás rendkívül alacsony, gyakran 0,5-1% körüli. Teljes terhelésen a csúszás értéke jellemzően 2-5% között mozog, de nagyobb motoroknál akár 0,5-2% is lehet. A csúszás értékének növekedése azt jelenti, hogy a rotor fordulatszáma csökken a terhelés hatására.
A csúszásnak kiemelkedő jelentősége van, mivel:
- Nyomaték keletkezése: A csúszás szükséges az indukált feszültség és áram létrehozásához a rotorban, ami a forgatónyomatékot generálja. Minél nagyobb a csúszás (azaz minél lassabban forog a rotor a szinkron fordulatszámhoz képest), annál nagyobb az indukált feszültség és áram a rotorban, és ezzel együtt a nyomaték.
- Hatásfok: A csúszás összefügg a motor hatásfokával. A rotorban indukált áramok hővé alakulnak, ami veszteséget jelent. Minél nagyobb a csúszás, annál nagyobbak ezek a veszteségek.
- Üzemállapot: A csúszás jelzi a motor terhelési állapotát. Egy motor, amely nagymértékű csúszással üzemel, valószínűleg túlterhelt, vagy probléma van a táplálásával.
Egy aszinkron motor optimálisan akkor működik, ha a csúszása a tervezett tartományban van. A túl alacsony csúszás azt jelenti, hogy a motor nem ad le elegendő nyomatékot, míg a túl magas csúszás túlmelegedéshez és hatásfokromláshoz vezethet.
Az aszinkron motorok típusai
Bár az aszinkron motorok alapvető működési elve azonos, számos típusuk létezik, amelyek eltérő felépítéssel és alkalmazási területekkel rendelkeznek. A leggyakoribb megkülönböztetés az áramellátás fázisainak száma és a rotor felépítése alapján történik.
Egyfázisú aszinkron motorok
Az egyfázisú aszinkron motorok széles körben elterjedtek a háztartási és kisebb ipari alkalmazásokban, ahol csak egyfázisú hálózati csatlakozás áll rendelkezésre. Azonban az egyfázisú táplálás önmagában nem képes forgó mágneses mezőt létrehozni, csupán egy oszcilláló, pulzáló mezőt, ami nem elegendő az indításhoz. Ezért ezeknek a motoroknak valamilyen indító mechanizmusra van szükségük.
- Segédfázisú motorok: Egy további tekercselést (segédfázis) tartalmaznak, amely a fő tekercseléshez képest térben eltolva helyezkedik el. Ezen segédfázison keresztül egy kondenzátorral vagy nagyobb ohmos ellenállással az áramot fázisban eltolják, így indításkor egy elliptikus forgó mágneses mező jön létre. Amint a motor elér egy bizonyos fordulatszámot, a segédfázist egy centrifugális kapcsoló vagy elektronikus egység lekapcsolja.
- Kondenzátoros motorok: Ezek a leggyakoribbak. Lehetnek indító kondenzátorosak (csak indításkor aktív) vagy állandóan bekapcsolt kondenzátorosak (mindig bekapcsolva marad a segédfázissal). Az utóbbiak simább működést és jobb hatásfokot biztosítanak.
- Árnyékolt pólusú motorok: Kisebb teljesítményű motoroknál alkalmazzák, ahol a stator pólusain egy rövidre zárt rézgyűrű (árnyékoló gyűrű) helyezkedik el. Ez a gyűrű egy késleltetett mágneses fluxust hoz létre, ami egy gyenge forgó mágneses mezőt eredményez az indításhoz. Indítónyomatékuk alacsony, de rendkívül egyszerűek és olcsók.
Gyakori alkalmazásaik: ventilátorok, szivattyúk, hűtőszekrények, mosógépek, szárítógépek.
Háromfázisú aszinkron motorok
A háromfázisú aszinkron motorok az ipari alkalmazások gerincét képezik, mivel robusztusak, hatékonyak és önindítóak. Két fő alcsoportjuk van a rotor felépítése szerint:
- Kalickás (ketreces) motorok: Ahogy korábban részleteztük, ezek a motorok rendkívül egyszerű felépítésűek, nincsenek csúszógyűrűk és kefék, ami alacsony karbantartási igényt és nagy megbízhatóságot eredményez. Indítónyomatékuk lehet alacsonyabb, és indítóáramuk magasabb, de modern vezérlőkkel (frekvenciaváltók) ezek a hátrányok kiküszöbölhetők. A legelterjedtebb ipari motorok.
- Tekercselt (csúszógyűrűs) motorok: Ezek a motorok külső ellenállások beiktatásával indíthatók, ami lehetővé teszi a nagy indítónyomatékot és az indítóáram korlátozását. Ezenkívül a rotor-ellenállás változtatásával bizonyos mértékű fordulatszám-szabályozás is megvalósítható. Bonyolultabbak és drágábbak, mint a kalickás motorok, és a kefék-csúszógyűrűk rendszere karbantartást igényel. Jellemzően darukban, felvonókban, nagy tehetetlenségű rendszerekben alkalmazzák.
Polaritásváltós motorok (Dahlander-kapcsolás)
Egy speciális típus a polaritásváltós motor, amelynek statortekercselése úgy van kialakítva, hogy a pólusszám átkapcsolással megváltoztatható. A legismertebb ilyen kapcsolás a Dahlander-kapcsolás, amely két különböző, rögzített fordulatszámot tesz lehetővé (általában 1:2 arányban, pl. 1500/3000 ford/perc). Ezeket a motorokat olyan alkalmazásokban használják, ahol két rögzített sebességre van szükség, például kétsebességes szerszámgépeknél vagy ventilátoroknál.
„A megfelelő aszinkron motor kiválasztása kritikus fontosságú a rendszer hatékonysága és élettartama szempontjából; a döntés alapja a rendelkezésre álló áramellátás, a szükséges indítónyomaték és a fordulatszám-szabályozási igény.”
Jellemzők és teljesítményparaméterek
Az aszinkron motorok jellemzésére számos műszaki paraméter szolgál, amelyek megértése elengedhetetlen a megfelelő motor kiválasztásához és üzemeltetéséhez.
Nyomaték-fordulatszám görbe
Az aszinkron motor egyik legfontosabb jellemzője a nyomaték-fordulatszám görbéje. Ez a görbe megmutatja, hogyan változik a motor által kifejtett nyomaték a fordulatszám függvényében, az indítástól egészen a szinkron fordulatszámhoz közeli üzemig. A görbe főbb pontjai:
- Indítónyomaték (Tind): A motor által álló helyzetből (n=0) kifejtett nyomaték. Kalickás motoroknál ez általában a névleges nyomaték 1-2,5-szerese, csúszógyűrűs motoroknál külső ellenállással akár 3-4-szerese is lehet.
- Billenőnyomaték (Tbill): A maximális nyomaték, amit a motor leadni képes, mielőtt „billenő” állapotba kerülne, azaz leállna a túlterhelés miatt. Ez általában a névleges nyomaték 2-3-szorosa.
- Névleges nyomaték (Tnévl): Az a nyomaték, amit a motor folyamatosan, túlmelegedés nélkül képes leadni névleges fordulatszámon.
A görbe alakja kritikus az alkalmazás szempontjából. Egy ventilátor például alacsony indítónyomatékot igényel, míg egy szállítószalag, amely tele van áruval, sokkal nagyobbat.
Hatásfok (η)
A hatásfok a motor által felvett elektromos teljesítmény és a leadott mechanikai teljesítmény aránya. Minél magasabb a hatásfok, annál kevesebb energia vész el hő formájában. Az aszinkron motorok hatásfoka általában 70% és 95% között mozog, a motor méretétől és tervezésétől függően. A modern, energiatakarékos motorok (IE3, IE4 osztály) hatásfoka kiemelkedően magas, ami jelentős üzemeltetési költségmegtakarítást eredményez.
Teljesítménytényező (cos φ)
A teljesítménytényező (cos φ) azt mutatja meg, hogy a motor mekkora arányban használja fel az áramot hasznos munkára. Egy aszinkron motor induktív terhelésként viselkedik, ami azt jelenti, hogy az áram késik a feszültséghez képest, és meddő teljesítményt vesz fel a hálózatból a mágneses mező fenntartásához. A magas teljesítménytényező (közel 1) kívánatos, mert csökkenti a hálózati veszteségeket és a számlázott meddő teljesítmény díját. Általában 0,7 és 0,9 között mozog teljes terhelésen.
Névleges adatok
Minden aszinkron motor adattábláján számos névleges adat található, amelyek alapvető információkat szolgáltatnak a motorról:
- Névleges feszültség (Un): Az a feszültség, amelyre a motor tervezve van (pl. 230/400 V).
- Névleges áram (In): Az a maximális áram, amit a motor névleges terhelésen felvehet.
- Névleges teljesítmény (Pn): Az a mechanikai teljesítmény, amit a motor névleges fordulatszámon lead.
- Névleges fordulatszám (nn): A motor tényleges fordulatszáma névleges terhelésen (ez mindig alacsonyabb, mint a szinkron fordulatszám).
- Frekvencia (f): A hálózati frekvencia (pl. 50 Hz).
- Védettségi osztály (IP): A motor burkolatának védelmi szintje por és víz ellen (pl. IP54).
- Szigetelési osztály: A tekercsek szigetelésének hőállósága.
Ezen adatok ismerete elengedhetetlen a motor biztonságos és hatékony üzemeltetéséhez, valamint a megfelelő védelmek kiválasztásához.
Indítási módszerek és problémák

Az aszinkron motorok indítása különleges figyelmet igényel, különösen a nagyobb teljesítményű típusoknál. Ennek oka, hogy indításkor a motorok rendkívül magas áramot vehetnek fel a hálózatból, ami akár 5-8-szorosa is lehet a névleges áramnak. Ez az indítóáram-lökés feszültségesést okozhat a hálózaton, zavarhatja más fogyasztók működését, és károsíthatja magát a motort vagy a hajtott gépet. Ezért különböző indítási módszereket fejlesztettek ki.
Közvetlen indítás (DOL – Direct On-Line)
Ez a legegyszerűbb és leggyakoribb indítási mód kisebb teljesítményű motoroknál (általában 4-5,5 kW-ig). A motor tekercseit közvetlenül a hálózati feszültségre kapcsolják. Előnyei:
- Egyszerű kapcsolástechnika.
- Alacsony költség.
- Nagy indítónyomaték (azonnali).
Hátrányai:
- Rendkívül nagy indítóáram.
- Nagy mechanikai terhelés a hajtott gépre (hirtelen nyomatéklökés).
- Feszültségesés a hálózaton.
Gyakran alkalmazzák kis ventilátorok, szivattyúk és kompresszorok indítására, ahol a hálózat és a mechanikai rendszer is elviseli a terhelést.
Csillag-delta indítás
A csillag-delta (Y-Δ) indítás a legelterjedtebb módszer a közepes teljesítményű (kb. 5,5 kW-tól 100 kW-ig) háromfázisú aszinkron motorok indítására az indítóáram csökkentése érdekében. Ennek lényege, hogy a motor tekercseit indításkor csillag kapcsolásba kötik, majd egy rövid idő (néhány másodperc) elteltével, amikor a motor elérte a névleges fordulatszám körülbelül 80%-át, átkapcsolják delta kapcsolásba.
- Előnyei:
- Az indítóáram és az indítónyomaték is 1/3-ára csökken a közvetlen indításhoz képest.
- Viszonylag egyszerű és költséghatékony megoldás.
- Hátrányai:
- Az indítónyomaték is csökken, ami nem minden alkalmazásnál elegendő.
- Az átkapcsolás pillanatában rövid ideig tartó áramlökés és nyomatékingadozás léphet fel.
- Csak olyan motoroknál alkalmazható, amelyek delta kapcsolásban működnek névleges feszültségen, és csillag kapcsolásban is elviselik az indítást.
Például egy nagy teljesítményű szivattyú vagy egy szállítószalag gyakran csillag-delta indítással indul.
Lágyindítók (Soft Starterek)
A lágyindítók elektronikus eszközök, amelyek félvezető teljesítményelektronikával (tiristorokkal) szabályozzák a motorra kapcsolt feszültséget. Fokozatosan növelik a feszültséget az indítás során, így sima, rántásmentes indítást biztosítanak.
- Előnyei:
- Jelentősen csökkentik az indítóáramot és a mechanikai igénybevételt.
- Fokozatmentesen állítható indítási idő és nyomaték.
- Csökkentik a hálózati zavarokat.
- Bizonyos típusoknál leálláskor is alkalmazható lágyfékezés.
- Hátrányai:
- Magasabb költség, mint a hagyományos indítók.
- Hőtermelés a félvezetőkben, ami hűtést igényel.
- Nem képesek fordulatszám-szabályozásra üzem közben.
Ideálisak szivattyúkhoz, ahol a vízlökés elkerülése fontos, vagy szállítószalagokhoz, ahol a rántásmentes indítás védi az árut és a mechanikát.
Frekvenciaváltók (VFD – Variable Frequency Drive / Inverterek)
A frekvenciaváltók a legfejlettebb és legrugalmasabb indítási és fordulatszám-szabályozási módszert kínálják. Ezek az eszközök nemcsak a motorra kapcsolt feszültséget, hanem a tápláló áram frekvenciáját is szabályozzák. Ezzel a motor fordulatszáma és nyomatéka is precízen beállítható az indítástól a névleges üzemig.
- Előnyei:
- Rendkívül sima, szabályozott indítás és leállás.
- Az indítóáram a névleges áram közelében tartható.
- Folyamatos fordulatszám-szabályozás a teljes tartományban.
- Jelentős energiamegtakarítás részterhelésen.
- Képesség a motor fékezésére.
- Hátrányai:
- Magasabb kezdeti beruházási költség.
- Harmonikus torzításokat okozhat a hálózaton (bár modern VFD-k ezt minimalizálják).
- Tudást és tapasztalatot igényel a beállításuk és üzemeltetésük.
A frekvenciaváltók széles körben alkalmazhatók szinte minden ipari területen, ahol precíz szabályozásra és energiahatékonyságra van szükség, például CNC gépeknél, papírgyártásban, szellőzőrendszerekben.
Az alábbi táblázat összefoglalja az indítási módszerek főbb jellemzőit:
| Módszer | Indítóáram | Indítónyomaték | Költség | Szabályozhatóság | Alkalmazási terület |
|---|---|---|---|---|---|
| Közvetlen (DOL) | Magas (5-8x In) | Magas | Alacsony | Nincs | Kis teljesítményű motorok, egyszerű alkalmazások |
| Csillag-delta (Y-Δ) | Közepes (1.7-2.7x In) | Közepes (1/3 Tind) | Közepes | Nincs | Közepes teljesítményű motorok, ahol az indítónyomaték elegendő |
| Lágyindító | Alacsony (1.5-4x In) | Szabályozható | Magas | Indítás/leállás szabályozása | Sima indítást igénylő gépek (szivattyúk, szállítószalagok) |
| Frekvenciaváltó | Nagyon alacsony (0.5-1.5x In) | Szabályozható | Nagyon magas | Teljes fordulatszám- és nyomatékszabályozás | Precíziós vezérlést, energiahatékonyságot igénylő alkalmazások |
Fordulatszám-szabályozási módszerek
Az aszinkron motorok fordulatszámának szabályozása kulcsfontosságú számos ipari alkalmazásban. Bár a hagyományos aszinkron motorok fix fordulatszámra vannak tervezve a hálózati frekvencia és a pólusszám alapján, léteznek módszerek a fordulatszám módosítására.
Pólusszám változtatása
Ahogy a szinkron fordulatszám képlete (ns = (120 * f) / P) is mutatja, a pólusszám (P) megváltoztatásával a szinkron fordulatszám is módosul. Ezt a Dahlander-kapcsolású motorok teszik lehetővé, amelyek tekercselése átkapcsolható, így két rögzített fordulatszámot kínálnak (pl. 2 és 4 pólus, azaz 3000 és 1500 ford/perc 50 Hz-en). Ez egy viszonylag egyszerű, mechanikus megoldás, de csak diszkrét lépésekben teszi lehetővé a fordulatszám-változtatást.
Feszültség változtatása
A motorra kapcsolt feszültség csökkentése a nyomaték csökkenéséhez vezet, ami befolyásolja a motor csúszását és végső soron a fordulatszámát. Azonban ez a módszer nem hatékony, és jelentősen rontja a motor hatásfokát, valamint túlmelegedéshez vezethet. Csak nagyon korlátozott fordulatszám-tartományban és csak alacsonyabb teljesítményű motoroknál alkalmazható, ahol a nyomatékigény is alacsony.
Rotor-ellenállás változtatása (csúszógyűrűs motoroknál)
Csak tekercselt (csúszógyűrűs) motoroknál alkalmazható. A külső ellenállások beiktatása a rotor áramkörébe növeli a rotor ellenállását, ami növeli a csúszást és csökkenti a motor fordulatszámát adott nyomaték mellett. Ez a módszer viszonylag egyszerű és képes szabályozni a fordulatszámot, de jelentős hőveszteséggel jár az ellenállásokban, és rontja a hatásfokot. Manapság egyre ritkábban használják folyamatos szabályozásra, inkább csak indítási célokra.
Frekvencia változtatása (Frekvenciaváltók)
Ez a legmodernebb és leghatékonyabb módszer, amelyet a frekvenciaváltók (VFD – Variable Frequency Drive, vagy inverterek) tesznek lehetővé. A frekvenciaváltó egyenirányítja a hálózati váltakozó áramot egyenárammá, majd ebből egy saját, változtatható frekvenciájú és feszültségű váltakozó áramot állít elő a motor számára. Mivel a motor fordulatszáma arányos a tápláló áram frekvenciájával (és a szinkron fordulatszámhoz képest a csúszás minimális), a frekvencia finomhangolásával a motor fordulatszáma is fokozatmentesen, precízen szabályozható a teljes tartományban (akár 0 Hz-től a névleges frekvenciánál magasabb értékekig).
- Előnyei:
- Rendkívül pontos és széles tartományú fordulatszám-szabályozás.
- Magas hatásfok a teljes fordulatszám-tartományban.
- Lehetővé teszi az energiahatékonyság növelését (különösen ventilátoroknál és szivattyúknál, ahol a teljesítményigény a fordulatszám harmadik hatványával arányos).
- Integrált indítási és leállási funkciók, motorvédelem.
- Hátrányai:
- Magasabb kezdeti beruházási költség.
- Elektromágneses kompatibilitási (EMC) kérdések, harmonikus torzítások (bár modern VFD-k beépített szűrőkkel rendelkeznek).
- A motor szigetelésére és hűtésére is figyelni kell alacsony fordulatszámon.
A frekvenciaváltók mára az ipari automatizálás elengedhetetlen részévé váltak, lehetővé téve a rendszerek optimalizálását és az energiamegtakarítást.
Előnyök és hátrányok
Az aszinkron motorok széles körű elterjedtsége nem véletlen, számos előnyös tulajdonsággal rendelkeznek, de mint minden technológiának, vannak bizonyos hátrányai is.
Előnyök
- Egyszerű felépítés: Különösen a kalickás motorok mechanikusan egyszerűek, nincsenek kefék, kommutátorok, ami csökkenti a meghibásodási lehetőségeket.
- Robusztusság és megbízhatóság: Kiválóan ellenállnak a zord ipari körülményeknek, hosszú élettartamúak.
- Alacsony ár: Gyártásuk viszonylag olcsó, ami gazdaságossá teszi őket.
- Kevés karbantartás: A kefék és kommutátorok hiánya miatt a kalickás motorok minimális karbantartást igényelnek (főleg csapágycsere).
- Magas hatásfok: Különösen a modern, energiatakarékos típusok (IE3, IE4) rendkívül hatékonyak.
- Önindító (háromfázisúak): Nem igényelnek külön indító mechanizmust (ellentétben az egyfázisúakkal).
Hátrányok
- Nehézkes fordulatszám-szabályozás (hagyományosan): Fix hálózati frekvencia mellett a fordulatszám csak korlátozottan vagy nem hatékonyan szabályozható (kivéve VFD-vel).
- Alacsony indítónyomaték (kalickás motoroknál): Különösen nagy terhelésű indításoknál ez problémát jelenthet, ami speciális indítási módszereket igényel.
- Nagy indítóáram: Közvetlen indításkor a névleges áram többszörösét is felvehetik, ami hálózati zavarokat és védelmi problémákat okozhat.
- Meddő teljesítmény felvétele: Induktív terhelésként meddő teljesítményt vesznek fel a hálózatból a mágneses mező fenntartásához, ami rontja a teljesítménytényezőt (cos φ). Ezt kompenzálni kell (kondenzátor teleppel).
- A csúszásból adódó veszteségek: A rotorban indukált áramok hővé alakulnak, ami energiaveszteséget jelent.
A hátrányok ellenére a modern vezérlőtechnológiák (különösen a frekvenciaváltók) jelentősen mérséklik ezeket, így az aszinkron motorok továbbra is az első számú választásnak számítanak az ipari hajtások területén.
Gyakorlati alkalmazási példák
Az aszinkron motorok sokoldalúsága és megbízhatósága miatt szinte mindenhol találkozhatunk velük, az ipari óriásoktól a mindennapi háztartási eszközökig. Nézzünk néhány konkrét példát:
Ipari gépek
- Szivattyúk: Víz- és szennyvízkezelésben, vegyiparban, öntözésben, fűtési és hűtési rendszerekben. A frekvenciaváltók alkalmazásával jelentős energiamegtakarítás érhető el.
- Ventilátorok és fúvók: Szellőzőrendszerekben, klímaberendezésekben, hűtőtornyokban, ipari elszívókban. A fordulatszám-szabályozás itt is kulcsfontosságú az energiahatékonyság és a zajszint optimalizálása szempontjából.
- Kompresszorok: Sűrített levegős rendszerekben, hűtőgépekben. A sima indítás és a szabályozott működés meghosszabbítja az élettartamot.
- Szállítószalagok és futószalagok: Bányászatban, logisztikában, gyártósorokon. A lágyindítók és frekvenciaváltók biztosítják a rántásmentes indítást és a sebesség adaptálását.
- Daruk és felvonók: Különösen a csúszógyűrűs motorok, vagy frekvenciaváltóval vezérelt kalickás motorok biztosítják a nagy indítónyomatékot és a precíz pozícionálást.
- Szerszámgépek: Esztergagépek, marógépek, fúrógépek. Itt a Dahlander motorok vagy frekvenciaváltók a fordulatszám-változtatás lehetőségét biztosítják.
- Mezőgazdasági gépek: Gabonatárolók ventilátorai, takarmánykeverők, öntözőrendszerek szivattyúi.
Háztartási gépek
Bár itt gyakran egyfázisú motorokkal találkozunk, az alapelv ugyanaz:
- Mosógépek és szárítógépek: A dob forgatását végzik. Modern gépekben már gyakran alkalmaznak inverteres motorokat a nagyobb hatásfok és a csendesebb működés érdekében.
- Hűtőszekrények és fagyasztók: A kompresszor meghajtását végzik.
- Konyhai robotgépek, turmixgépek: Kisebb teljesítményű egyfázisú aszinkron motorok.
- Porszívók: Bár sok porszívóban univerzális motor található, vannak aszinkron motoros változatok is.
- Kerti szivattyúk és fűnyírók: Kisebb teljesítményű egyfázisú aszinkron motorok.
Egyéb alkalmazások
- Elektromos járművek: Bár a permanens mágneses szinkron motorok egyre elterjedtebbek, számos elektromos járműben (pl. korábbi Tesla modellekben) aszinkron motorokat használnak a hajtáshoz, a frekvenciaváltóval történő precíz vezérlésnek köszönhetően.
- Vonatok és villamosok: A modern vontatási rendszerekben is gyakran alkalmaznak aszinkron motorokat, a frekvenciaváltós vezérléssel együtt.
Ezek a példák is jól mutatják, hogy az aszinkron motorok milyen alapvető szerepet játszanak a technológiai fejlődésben és a mindennapi életünkben.
Karbantartás és hibaelhárítás

Az aszinkron motorok híresek robusztusságukról és megbízhatóságukról, de a hosszú és problémamentes működéshez elengedhetetlen a rendszeres karbantartás és a hibák időben történő felismerése. A megelőző karbantartás mindig költséghatékonyabb, mint a javítás.
Rendszeres ellenőrzések
- Csapágyak: A leggyakoribb hibaforrás. Rendszeres kenést igényelnek (ha nem zárt típusúak), és figyelni kell a zajra, vibrációra, túlmelegedésre. A csapágyak cseréje viszonylag egyszerű karbantartási feladat.
- Szigetelés ellenállása: Időszakosan ellenőrizni kell a tekercsek szigetelését (meggerrel), különösen párás vagy poros környezetben, hogy elkerüljük a zárlatokat.
- Hűtés: A hűtőbordák tisztaságát és a hűtőventilátor működését ellenőrizni kell. A por és szennyeződés eltömítheti a járatokat, ami túlmelegedéshez vezet.
- Villamos csatlakozások: A sorkapcsok és kábelcsatlakozások rendszeres ellenőrzése a laza kötések és a korrózió elkerülése érdekében, amelyek ellenállásnövekedést és túlmelegedést okozhatnak.
- Rotor-stator légrés: Bár ritkán változik, extrém esetekben a rotor súrlódhat a statorral, ami súlyos károkat okozhat.
Gyakori hibák és azok okai
- Túlmelegedés: Lehetséges okok: túlterhelés, rossz hűtés, túl magas környezeti hőmérséklet, alacsony hálózati feszültség, fáziskiesés, csapágyhiba.
- Túlzott zaj és vibráció: Lehetséges okok: kiegyensúlyozatlan rotor, csapágyhiba, tengelykapcsoló probléma, laza rögzítés, elektromos hiba (pl. fáziskiesés).
- A motor nem indul el vagy lassan indul: Lehetséges okok: fáziskiesés, alacsony hálózati feszültség, túl nagy terhelés, kondenzátor hiba (egyfázisú motoroknál), tekercsszakadás vagy zárlat.
- Túlzott áramfelvétel: Lehetséges okok: túlterhelés, fáziskiesés, tekercsszigetelés hibája, rövidzárlat.
- Fáziskiesés: Egy háromfázisú motor egy fázis kiesése esetén megpróbálhat tovább működni (ha már forog), de jelentősen túlterhelődik a megmaradt két fázis, ami gyors túlmelegedéshez és leégéshez vezethet. Ezért fontos a fáziskiesés-védelem.
A modern motorvédelmi relék és frekvenciaváltók számos beépített diagnosztikai és védelmi funkcióval rendelkeznek, amelyek segítenek a hibák megelőzésében és az üzemidő maximalizálásában.
Az aszinkron motorok jövője és az energiahatékonyság
A globális energiaproblémák és a környezetvédelmi szempontok egyre nagyobb hangsúlyt fektetnek az energiahatékonyságra. Az aszinkron motorok, mint az energiafogyasztás jelentős részéért felelős eszközök, kiemelt figyelmet kapnak ezen a téren. Az elmúlt években szigorúbb szabályozások és szabványok léptek életbe az energiahatékonysági osztályok (IE – International Efficiency) meghatározására.
IE osztályok
- IE1 (Standard Efficiency): Hagyományos hatásfokú motorok.
- IE2 (High Efficiency): Magas hatásfokú motorok.
- IE3 (Premium Efficiency): Prémium hatásfokú motorok, amelyek Európában és számos más régióban minimális követelményt jelentenek sok alkalmazásban.
- IE4 (Super Premium Efficiency): Szuper prémium hatásfokú motorok, a legmagasabb szintű energiamegtakarítást kínálják.
- IE5 (Ultra Premium Efficiency): A legújabb és leghatékonyabb kategória, amely még tovább csökkenti az energiaveszteségeket.
Az egyre magasabb IE osztályú motorok fejlesztése és kötelezővé tétele jelentős mértékben hozzájárul az ipari energiafogyasztás csökkentéséhez és a CO2-kibocsátás mérsékléséhez. Ezek a motorok jobb anyagok, optimalizált tervezés és precízebb gyártási technológiák révén érik el magasabb hatásfokukat.
Technológiai fejlődés
Az aszinkron motorok jövője számos ígéretes irányba mutat:
- Anyagfejlesztés: Új, alacsonyabb veszteségű mágneses anyagok és jobb vezetők alkalmazása a statorban és a rotorban.
- Optimalizált tervezés: Számítógépes szimulációk és mesterséges intelligencia alapú tervezési eszközök segítik a motorok geometriájának és tekercselésének finomhangolását a maximális hatásfok érdekében.
- Integrált vezérlés: Az aszinkron motorok egyre inkább integrált frekvenciaváltókkal és intelligens vezérlőrendszerekkel kerülnek forgalomba, amelyek egyszerűsítik a telepítést és növelik az energiahatékonyságot.
- Ipari 4.0 és IoT: Az aszinkron motorokba beépített szenzorok és kommunikációs modulok lehetővé teszik a valós idejű állapotfelügyeletet, a prediktív karbantartást és az energiafogyasztás optimalizálását a hálózaton keresztül.
Az aszinkron motorok továbbra is a modern ipar és technológia sarokkövei maradnak, folyamatos fejlődésük pedig hozzájárul egy fenntarthatóbb és hatékonyabb jövő építéséhez.






